
Каталог подводных роботов
Каталог подводных роботов -- Подводные роботы
Telegram:
см. также Каталог подводных военных роботизированных аппаратов
см. также Каталог любительских подводных апппаратов
см. также Производители подводных роботов
см. также Подводные роботы для работы на дне
см. также XLUUV - большие подводные роботы / включая LDUUV - подводные роботы с большим дальнодействием
Россия
Аппараты по алфавиту
- Аврора, АНПА, см. Аврора (НПО Аврора), Россия
- Айсберг, см. Рубин (ЦКБ МТ Рубин), Россия
- Акмобиль, см. Моринсис-Агат, Россия
- Амулет, см. Рубин (ЦКБ "Рубин"), Россия
- АС-РОВ, см. Тетис Про, Россия
- Атом, см. Тетис Про, Россия
- Блюфин 9, см. Тетис-КС, Россия
- Блюфин 21, см. Тетис-КС, Россия
- Витязь (Витязь-Д), см . Рубин (ЦКБ МТ Рубин), Россия
- Волновой глайдер, надводный и подводный модули, соединенные кабель-тросом. Разработка - Океанос (НПП ПТ Океанос) и ФГБОУ ВО СПбГМТУ, Россия
- Гавия, см. Тетис-Про (Teledyne, создан в компании Harfmynd, Исландия), США
- Галтель - Алеврит (АНПА), нет данных по разработчику, Россия
- Галтель (ТНПА), нет данных по разработчику, Россия
- Глайдер (Морская тень), см. Океанос, Россия
- Гном, см. Индэл-Партнер, Россия
- Гном baby, см. Индэл-Партнер, Россия
- Дельфин, см. Тетис-КС, Россия
- Калан, см. Разумные технологии, Самарская область, Россия
- Квазар, см. Тетис ПРО, Россия
- Квантум, см. Тетис ПРО, Россия
- Клавесин-1Р, см. Рубин (ЦКБ Рубин) и ДВО РАН, Россия
- Клавесин-2Р-ПМ, см. Рубин (ЦКБ Рубин), Россия
- Клавесин-2М-2P, см. Рубин (ЦКБ Рубин), Россия
- Концепт-М (российская версия Gavia), см. ГК Тетис, Россия
- Кугуар XT, см. Тетис ПРО, Россия
- Кугуар XTi, см. Тетис ПРО, Россия
- Кугуар XT Компакт, см. Тетис ПРО, Россия
- Леопард, см. Тетис ПРО, Россия
- Линкс, см. Тетис ПРО, Россия
- Маевка, см. Регион (ОАО ГНПП Регион), Россия
- Малахит (ТНПА Малахит), см. ИПУ им. Трапезникова (Институт проблем управления им. Трапезникова РАН), Россия
- Марлин-350, малогабаритный ТНПА, см. Тетис КС, Россия
- Моби Дик, малогабаритный ТНПА, The "Whale", Россия
- МФПА, демонстратор подводного ангара, см. Малахит (АО СПМБМ Малахит, Санкт-Петербургское морское бюро машиностроения Малахит
- им. ак. Н.Н.Исанина, входит в ОСК), С.Петербург
- Обзор, см. малогабаритный ТНПА, см. Тетис ПРО, Россия
- Обзор Про, малогабаритный ТНПА, см. Тетис ПРО, Россия
- Обзор-600, малогабаритный ТНПА, 15 кг, 600 м, Россия
- Одиссей (Odyssey), малогабаритный ТНПА, 18,5 кг, до 50 м, см.ТГУ, Россия, Томск
- Пантера XT, ТНПА легкого класа, предположительно один из "продуктов" Тетис-Про
- Пантера XT Плюс, ТНПА легкого класа, предположительно один из "продуктов" Тетис-Про
- Пилигрим, ДВО РАН, Россия
- Платформа, АНПА, глубины до 500 м, ДВО РАН, Россия
- Сабфайтер 3000, ТНПА легкого класса, см. Тетис ПРО, Россия
- Сабфайтер 4500, ТНПА легкого класса, см. Тетис ПРО, Россия
- Сабфайтер 10К, ТНПА легкого класса, см. Тетис ПРО, Россия
- Сабфайтер 15К, ТНПА легкого класса, см. Тетис ПРО, Россия
- Сабфайтер 30К, ТНПА легкого класса, см. Тетис ПРО, Россия
- Сарма, разработчик неизвестен, Россия
- Симор, ТНПА легкого класса, см. Тетис ПРО, Россия
- Слокум Глайдер, АНПА, см. Тетис-КС, Россия
- Статус, АНПА с ядерной энергоустановкой, см. разработчик неизвестен, существование под вопросом, Россия
- Супер Гном Pro, ТНПА легкого класса, см. Индэл-Партнер, Россия
- Супер Гном Pro, ТНПА легкого класса, см. Индэл-Партнер, Россия
- Тайгер, ТНПА легкого класса, до 300 м, см. Тетис ПРО, Россия
- Тунец-1, ННГУ (Нижегородский государственный университет им. Н.И.Лобачевского), Нижний Новгород
- Фалкон, ТНПА легкого класса, до 300 м, см. Тетис-КС, Россия
- Фалкон 1000, ТНПА легкого класса, до 1000 м, см. Тетис ПРО, Россия
- Ягуар, ТНПА тяжелого класса, Тетис ПРО, Россия
- Юнона, разработчик неизвестен, Россия
- Concept, разработчик неизвестен, Россия
- Mariam I, см. Russian Bionics Lab, Россия, Самара
- Mariam II, см. Russian Bionics Lab, Россия, Самара
- Mariam III, см. Russian Bionics Lab, Россия, Самара
- MUR (Micro Underwater Robot), конструктор подводного робота, см. Центр робототехники (ООО "Центр робототехники), Владивосток
- ROV RB-50, ТНПА легкого класса, см. ROVBUILDER, Россия
- ROV RB-150, ТНПА легкого класса, до 70 м, см. ROVBUILDER, Россия
- ROV RB-300, ТНПА легкого класса, до 120 м, см. ROVBUILDER, Россия
- ROV RB-600, ТНПА легкого класса, до 400 м, см. ROVBUILDER, Россия
- ROV RB-MIRAGE, ТНПА легкого класса, ROVBUILDER, Россия
- ROV X15, проект ТНПА, см. Hydrobot-X, Россия
- ROV X450, проект ТНПА, Hydrobot-X, Россия
- TurtleROV, ТНПА легкого типа, Elmics, Россия
- TurtleROV2, ТНПА легкого типа, Elmics, Россия
Аврора (НПО "Аврора"), Россия
Аврора, Аврора (НПО "Аврора"), Россия
АНПА. Подводный автономный необитаемый аппарат. Назначение двойное. Для использования силовыми структурами может требоваться адаптация. . Оснащение: эхолот, гидролокатор бокового обзора, допплеровский лаг, гидроакустическая система позиционирования и связи, спутниковая и инерциальная навигационные системы, измерители глубины и скорости. Аккумулятор: 1200 Втч литий-железо-фосфатный. Гидроакустическая система работает на расстоянии до 3.5 км и позволяет передавать данные со скоростью до 13,9 кбит/с. На поверхности дальность связи по Wi-Fi - до 1.5 км.
Длина: 215 см, диаметр - 20 см. Масса - 63 кг. Глубина погружения - до 1000 м. Максимальная скорость - до 2.5 м/c. Автономность работы от аккумулятора - не мнеее 6 часов.
2017.09.21 Концерн "НПО Аврора" создал подводного конкурента "Юноны" /
ДВО РАН, Владивосток, Россия
Пилигрим, ДВО РАН, Россия
Платформа, ДВО РАН, Россия
АНПА, создан в 2016 году, анонс в июле 2016 года. Может работать на шельфе или в мировом океане на глубинах до 500 метров. Длина корпуса - 3 метра.
Индэл-Партнер (ООО Индэл-Партнер)
Гном, ООО Индэл-Партнер, Россия

Источник фото: Робоцентр Сколково. Слева на фото - руководитель компании Подводная Робототехника Борис Розман.
2015.02 Телеуправляемый подводный аппарат производства компании Подводная Робототехника. Коммерчески доступен. Используется камера в алюминиевом корпусе, светодиодные осветители, кабели электропитания и передачи видеосигнала, а также для передачи команд от оператора к роботу. Для управления роботом используется джойстик, сигнал с камеры поступает на видеофон. Кабель намотан на катушку позади аппарата, это позволяет сэкономить энергию на разматывание. Гном стоит чуть более $10 тыс. , способен опускаться до 150 метров, двигаться со скоростью до 5.1 км/ч при массе 12 кг. Аппараты активно продаются за рубеж, есть более 10 дилеров по всему миру. От аналогов компаний Seabotix и VideoRay - отличается меньшим весом за счет использования композитных материалов и большей прочностью. Также среди конкурентных преимуществ - кабель диаметром 3 мм вместо обычных 8 мм (уменьшение "водяного паруса"), магнитная муфта, снижающая трение при погружении. Закупает Гномы, например, МЧС и ВМФ РФ.
Гном baby, ООО Индэл-Партнер, Россия
Самый небольшой из аппаратов серии Гном. Глубина погружения - до 50 м, скорость - до 3.7 км/ч, масса - 1.5 кг. Возможно самый маленький ROV в мире. Цена - от $5 тыс.
2015.02.12
Супер Гном Pro, ООО Индэл-Партнер, Россия
ВМФ России закупает 4 аппарата Супер Гном Pro ежегодно. Аппарат стоит от $21 тысячи. Скорость 7.2 км/ч. Масса более 25 кг. Аппарат поставляется в составе системы, в которую входят кабель и надводный блок с ПДУ. Два вертикальных и 4 горизональных двигателя. Две видеокамеры и манипулятор.
2015.02.12
ИПМТ ДВО РАН
Галтель - Алеврит (АНПА), ИПМТ ДВО РАН, Россия

Мобильный многоцелевой комплекс освещения донной и придонной обстановки типа "Галтель - Алеврит". Аппараты могут сканировать глубины до 400 м. В комплекс входит аппарат Чилим, предназначенный для уничтожения обнаруженных опасных предметов.
Галтель (ТНПА), Россия
Предположительно существует такой ТНПА в составе комплекса освещения донной и придонной обстановки.
ИПУ им. Трапезникова (Институт проблем управления им. Трапезникова РАН), Россия
Малахит (ТНПА Малахит), Институт проблем управления им. Трапезникова РАН, Россия
Телеуправляемый необитаемый подводный аппарат легкого класса (7 кг)
Малахит (АО СПМБМ Малахит, Санкт-Петербургское морское
бюро машиностроения Малахит
им. ак. Н.Н.Исанина, входит в ОСК), С.Петербург
Разработка подводных лодок, включая атомные, а также глобоководного аппарата Консул

Демонстратор многофункционального подводного ангара.
Моринсис-Агат, Россия
Акмобиль, Моринсис-Агат, Россия
Подводная роботизированная система для работ по сейсморазведке и освоению шельфовых месторождений. Модуль саморазвертывающейся мобильной антенны с синтезированной апертурой для мониторинга и морской сейсморазведки шельфовых месторождений углеводорода под ледовым покровом. Разрабатывается с 2014 года, на начало 2017 года есть протестированный прототип.
ННГУ (Нижегородский государственный университет
им. Н.И.Лобачевского), Нижний Новгород
Тунец-1, ННГУ (Нижегородский государственный университет им. Н.И.Лобачевского), Нижний Новгород
2018.08.24 Представлен миниатюрный биоморфный подводный робот БПС "Тунец-1" / , есть фото
Океанос, Россия
Глайдер (Морская тень), Океанос, Россия
фото: ЗАО "Научно-производственное предприятие подводных технологий Океанос", 2016.12
Автономный необитаемый подводный планер. Может вести поисковые работы, глубоководную разведку. Аппарат двойного назначения. Испытывается в составе перспективных подводных комплексов ВМФ РФ в 2016 году. Тип аппарата - подводный глайдер, подразумевает что он движется за счет изменения собственной плавучести.
Разумные технологии, Самарская область, Россия
Калан, Разумные технологии, Самарская область, Россия
2019.08 ГК "Разумные решения" представила на МАКС-2019 модель автономного надводно-подводного аппарата Калан. Аппарат предназначен для отбора проб водной среды, изысканий и измерений параметров подводных объектов, поиска затонувших объекто и обслуживания гидротехнических сооружений.
Регион (ОАО ГНПП Регион), Россия
Маевка, Регион (ОАО ГНПП Регион), Россия
Телеуправляемый НПА разработан в 2009 году. Назначение - для поиска мин. В небольшом количестве аппарат поступал на вооружение ВМФ России. Оснащен гидролокатором секторного обзора, тросорезом и зарядами взрывчатки для обезвреживания мин.
Глубина погружения - до 300 м. Может работать на удалении до 500 м от корабля.
Рубин (ЦКБ МТ Рубин), Россия
Айсберг, Рубин (ЦКБ МТ Рубин), Россия
проект создания подводных роботизированных комплексов, предназначенных для выполнения миссий на арктическом шельфе. Упоминания с апреля 2017 года. Существуют проекты ряда комплексов - энергетического, монтажного, сервисного, бурового (прорезание и обустройство скважин) и сервиса проведения сейсморазведки (подлодка и подводные роботы на борту). Разработки планируются на глубинах до 450 м. Проект предусматривает, что источником энергии для подводных роботов станут комплексы с ядерными реакторами.
Амулет, Рубин (ЦКБ "Рубин"), Россия
АНПА "Амулет", фото ЦКБ "Рубин",
АНПА. Статус неизвестен. На 2018 год известно о проведенных испытаниях и о демонстрации данного АНПА на специализированных выставках и Военно-морском салоне.
Витязь, Рубин (ЦКБ МТ Рубин), Россия

Витязь-Д - комплекс для глубоководных подводных исследований. Включает АНПА СГП, глубоководную донную станцию, поверхностный блок управления. Связь с судном-носителем происходит онлайн по гиброакустическому каналу. В 2020 году успешно выполнил погружение на дно Мариинской впадины.
Клавесин-1Р, Рубин (ЦКБ Рубин) и ДВО РАН, Россия

Необитаемый подводный аппарат с поддержкой автономности (АНПА).
Может преодолевать до 300 км. Масса - 2.5 тонны. Управляется заранее записанной программой, которая может дистанционно корректироваться по гидроакустическому каналу связи. Оснащен гидролокатором бокового обзора, электромагнитным искателем, видеокамерой и различными сенсорами.
В 2017 году 3 таких аппарата стоят на вооружении ВМФ России.
Клавесин-2Р-ПМ, Рубин (ЦКБ Рубин), Россия

Необитаемый подводный аппарат с поддержкой автономности (АНПА). Роботизированный комплекс, предназначенный для подводных работ - обслуживание буровых установок, изучение морского дня, наблюдение за линиями подводных коммуникаций. Для работы на глубинах до 6000 метров. На лето 2016 года существует опытный образец аппарата.
Предположительно войдет в комплект оборудования АПЛ проекта 949АМ "Антей" (Хабаровск, Белгород).
Длина - 6500 мм, диаметр - порядка 1 м, вес - 3700 кг. Запустить такой аппарат через стандартный торпедный аппарат российской АПЛ невозможно. Предположительня дальность хода - 50 км, глубина погружения - до 2000 м.
Назначение неизвестно.
ТГУ, Томский государственный университет, Томск, Россия
Одиссей (Odyssey), ТГУ, Россия, Томск
ROV, вес 18.5 кг. В разработке в ТГУ на ноябрь 2016 года. Глубины - до 50 м.
2016.11.10 В Томске разрабатывают подводный робот "Одиссей".
Тетис Про и Тетис КС, Россия
(Компании занимались закупками зарубежных подводных аппаратов двойного назначения и их адаптацией для использования в России. Также осуществляла собственные разработки ТНПА). Многие зарубежные аппараты получили российскую версию названия и позиционировались чуть ли не как российские, что может вводить в заблуждение.
АС-РОВ, Тетис Про, Россия
малогабаритный ТНПА
Атом, Тетис Про, Россия
рабочие ТНПА тяжелого класса
Блюфин 9, Тетис-КС, Россия
Автономный необитаемый подводный аппарат Bluefin-9 компании Bluefin Technologies, США. Закупался в Россию.
Блюфин 21, Тетис-КС, Россия
Автономный необитаемый подводный аппарат Bluefin-21 компании Bluefin Technologies, США. Закупался в Россию.
Гавия, Тетис-Про (Teledyne, создан в компании Harfmynd, Исландия), США

АНПА, созданный в Исландии компанией Hafmynd ehf. Создан до 2010 года. Использовался ВМФ РФ под названием "Гавиа". Закупался в РФ через ОАО "Тетис Про".
Дельфин, Тетис-КС, Россия
Автономный необитаемый подводный аппарат.
Квазар, Тетис ПРО, Россия
Рабочий ТНПА тяжелого класса
Квантум, Тетис ПРО, Россия
Рабочий ТНПА тяжелого класса
Концепт-М (российская версия Gavia), ГК Тетис, Россия

фото: Тетис-Про
АНПА "Концепт-М" (Concept-M). Для решения широкого набора задач по обследованию и освещения подводной обстановки на глубинах до 1000 м. Испытывались в 2014-2015 году. В 2018.08 аппарат применяли в соревнованиях Авароботикс-2018 во Владивостоке.
Кугуар XT, Тетис ПРО, Россия
Рабочий ТНПА легкого класса
Кугуар XTi, Тетис ПРО, Россия
Рабочий ТНПА легкого класса
Кугуар XT Компакт, Тетис ПРО, Россия
ТНПА легкого класса
Леопард, Тетис ПРО, Россия
Рабочий ТНПА тяжелого класса
Линкс, Тетис ПРО, Россия
ТНПА легкого класса
Марлин-350, Тетис КС, Россия

Телеуправляемый необитаемый подводный аппарат легкого класса. Предназначен для наблюдения за охраняемой территорией, поиска и обнаружения объектов (нарушителей) на подконтрольной территории и выполнения иных профессиональных операций, связанных с пресечением попыток незаметного проникновения на охраняемый объект.
Единственный серийно выпускаемый подводный робот России в 2017 году. Содержит зарубежные комплектующие.
Обзор, Тетис ПРО, Россия
малогабаритный ТНПА
Обзор Про, Тетис ПРО, Россия
малогабаритный ТНПА
Сабфайтер 3000, Тетис ПРО, Россия
ТНПА легкого класса
Сабфайтер 4500, Тетис ПРО, Россия
ТНПА легкого класса
Сабфайтер 10К, Тетис ПРО, Россия
ТНПА легкого класса
Сабфайтер 15К, Тетис ПРО, Россия
рабочий ТНПА легкого класса
Сабфайтер 30К, Тетис ПРО, Россия
рабочий ТНПА легкого класса
Симор, Тетис ПРО, Россия
малогабаритный ТНПА
Слокум Глайдер, Тетис-КС, Россия
Автономный необитаемый подводный аппарат
Тайгер, Тетис ПРО, Россия
ТНПА легкого класса. Приобретен в Швеции - SAAB Tiger. Глубина погружения - до 300 метров.
Фалкон, Тетис-КС, Россия
Малогабаритный телеуправляемый необитаемый подводный аппарат предназначенный для проведения осмотра. Приобретен в Швеции, как SAAB Seaeye Falcon, для нужд ВМФ России. Глубина погружения - до 300 метров.
Фалкон 1000, Тетис ПРО, Россия
ТНПА легкого класса. Приобретен в Швеции - SAAB Seaeye Falcon DR для нужд ВМФ России. Глубина погружения до 1000 м. Используется в 2016, 2017 годы в России.
Ягуар, Тетис ПРО, Россия
Рабочий ТНПА тяжелого класса
Центр робототехники (ООО "Центр робототехники), Владивосток
MUR (Micro Underwater Robot), Центр робототехники (ООО "Центр робототехники), Владивосток
MUR или Micro Underwater Robot - это конструкторы "Автономный подводный робот" для сборки подводных роботов. Адресован старшим школьникам и студентам. Программируемый робот, способный проводить подъемную фотосъемку. Имеет датчики положения. Допускает различные конфигурации сборки. Возможность программирования бортового компьютера позволяет тестировать различные алгоритмы автоматического управления, разрабатывать адаптивные системы навигации в водной среде. Может оснащаться дополнительными датчиками. Может преобразовываться в ТНПА с помощью кабеля.
Elmics, Россия
ТНПА, телеуправляемый необитаемый подводный аппарат.
TurtleROV2, Elmics, Россия

ТНПА. Рабочие глубины до 400 метров.
Hydrobot-X, Россия
ROV X15, Hydrobot-X, Россия
ТНПА. На апрель 2017 года - в проекте.
ROV X450, Hydrobot-X, Россия
ТНПА. На апрель 2017 года - в проекте.
Marine Geo Service
МСС-300, Marine Geo Service, Россия
ТНПА осмотрового класса для глубин до 300 м
МСС-350М, Marine Geo Service, Россия
ТНПА осмотрового класса для глубин до 300 м
МСС-1000, Marine Geo Service, Россия
ТНПА осмотрового класса для глубин до 1000 м
МСС-3000, Marine Geo Service, Россия
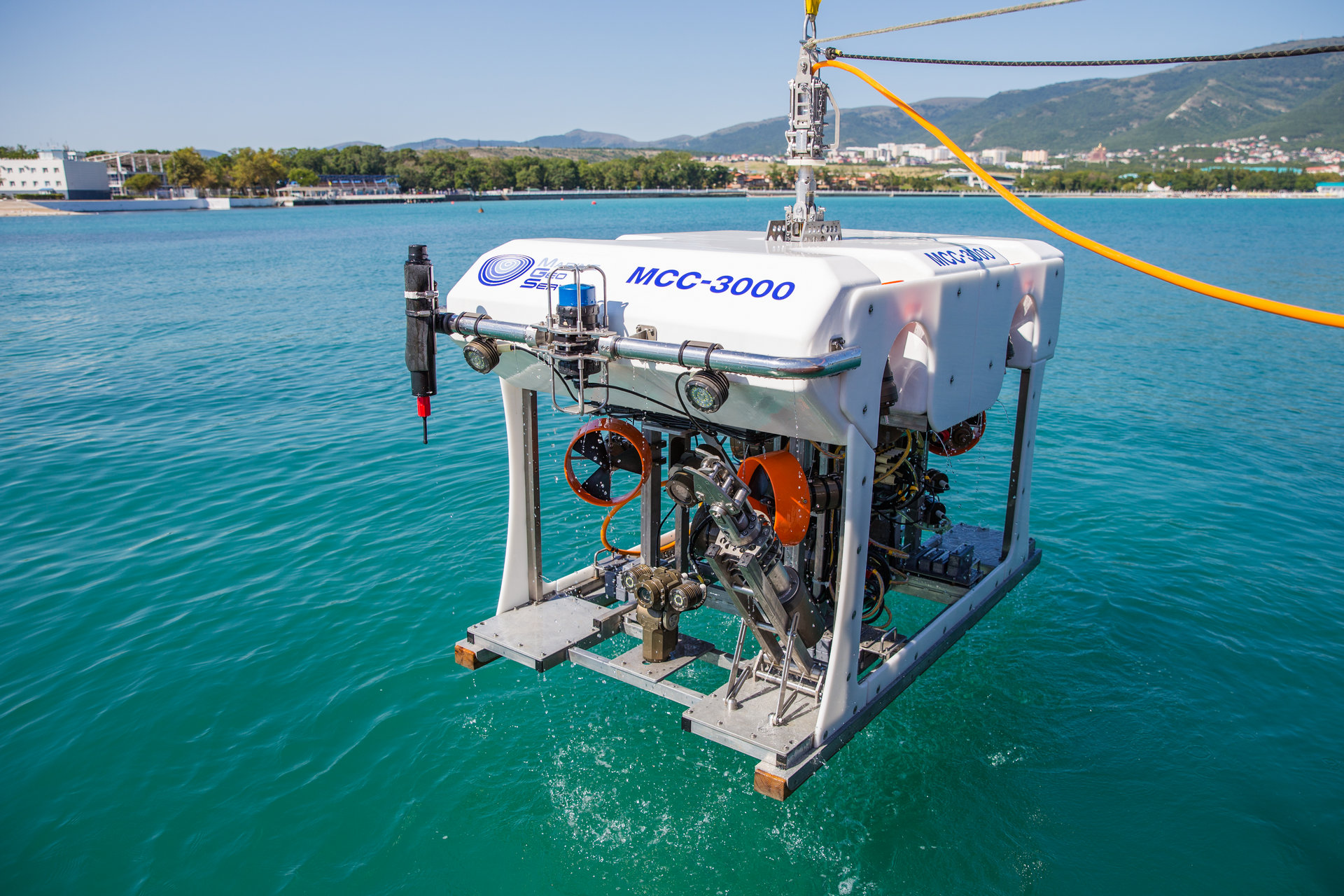
ТНПА осмотрового класса для глубин до 3000 м
ROVBUILDER, Россия
ROV RB-50, ROVBUILDER, Россия
Полупрофессиональный просмотровый ТНПА. Коммерчески доступен в 2017 году. Для работы на небольших глубинах с небольшим течением. .
ROV RB-150, ROVBUILDER, Россия
Осмотровый ТНПА. Коммерчески доступен в 2017 году. Подводные работы на глубинах до 70 м и удалении от базовой станции от 120 м. .
ROV RB-300, ROVBUILDER, Россия
Осмотровый ТНПА. Коммерчески доступен в 2017 году. Подводные работы на глубинах до 120 м и удалении от базовой станции от 220 м. .
ROV RB-600, ROVBUILDER, Россия
Осмотровый ТНПА. Коммерчески доступен в 2017 году. Подводные работы на глубинах до 400 м и удалении от базовой станции от 220 м до 1200 м. .
ROV RB-MIRAGE, ROVBUILDER, Россия
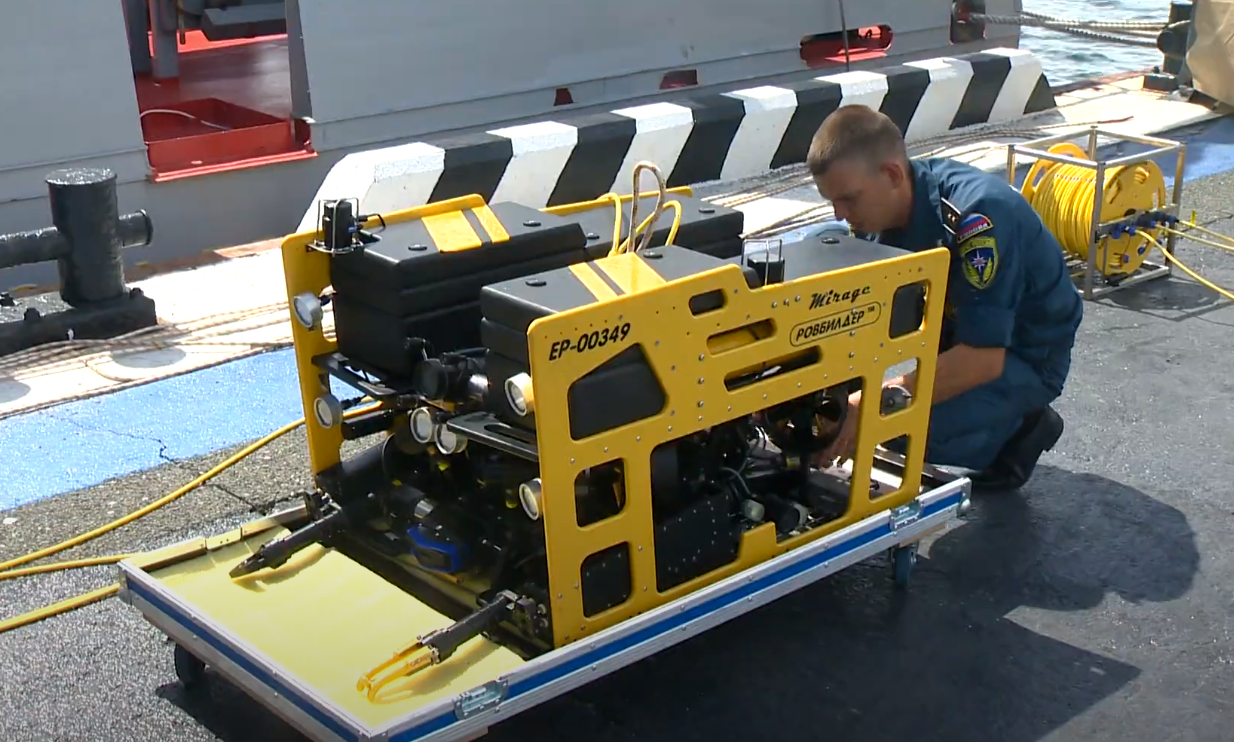
Осмотровый ТНПА. Коммерчески доступен в 2017 году. Подводные работы на глубинах до 500 м и удалении от базовой станции от 600 м до 1200 м. Используется МЧС (замечен на Аквароботех-2020). .
Russian Bionics Lab, Россия, Самара
Mariam I, Russian Bionics Lab, Россия, Самара
Проект АНПА, разрабатывался с 2015 года.
2017.06.23 В Самаре тестируют подводный планер. Пока что в бассейне.
Mariam II, Russian Bionics Lab, Россия, Самара
Проект АНПА, разрабатывался с 2016 года.
2017.06.23 В Самаре тестируют подводный планер. Пока что в бассейне.
Mariam III, Russian Bionics Lab, Россия, Самара
Проект АНПА, разрабатывался с 2016 года.
The Whale, Россия
Моби Дик, The "Whale", Россия
небольшой глубоководный ТНПА

источник фото: The "Whale"
Разработчик - нет данных
Обзор-600, Россия
ТНПА, вес 15 кг, гидролокатор, глубина погружения - 600 м, подъем грузов массой до 20 кг. Высокое сходство с американским ТНПА LBV-600-6. Предположительно - один из "продуктов" Тетис-Про
Пантера XT
рабочий ТНПА легкого класса. Предположительно - один из "продуктов" Тетис-Про
Пантера XT Плюс
рабочий ТНПА легкого класса. Предположительно - один из "продуктов" Тетис-Про
Сарма, ФПИ, Россия
в мае 2019 года упоминаются планы готовности демонстратора в июне 2019 года
Статус
Полумифический проект ударного НПА с ядерной энергоустановкой и ядерным вооружением. Существование и работоспособность аппарата - под вопросом.
Юнона, Россия
Роботизированный комплекс, предназначенный для подводных работ - обслуживание буровых установок, изучение морского дня, наблюдение за линиями подводных коммуникаций.
Данных нет. В 2018.08 участвовал в соревнованиях Аквароботех-2018 во Владивостоке.
Зарубеж
A27-M, ECA Group, Франция

источник фото: M.Denniel@Marine Nationale;
2016.04.29 . ECA Group показала возможности AUV A27-M - робота с длительным временем работы, предназначенного для операций по борьбе с подводным минированием. На сегодня это самый большой автономный подводный робот из семейства продуктов AUV производства французской компании ECA, предназначенных для противодействия минированию, способный к обнаружению, классификации и локализации мин. Время автономной работы - более 35 часов. Робот оснащен сонаром с управляемой апертурой и системой подводного запуска и приема на борт (LARS), что позволяет использовать систему в самых разных условиях на поверхности. Роботом управляет обновленное ПО UMIS, которое отвечает за движение UAV, за сбор и переработку данных.
Aquanaut, Houston Mechatronics, США

Подводный робот-трансформер АНПА / ТНПА.
Autosub 6000 LR, NOC, Объединенное Королевство

Автономный необитаемый подводный аппарат типа "автосаб" Autosub6000 LR (это не глайдер, а автономная подлодка). Аппарат Autosub6000 LR NOC создавался с идеей объединения глубоководных возможностей автосабов (они способны погружаться на глубину до 6000 метров) с дальнодействием (буквы LR в названии аппарата - от английского "long range") - возможностью оставаться под водой по много дней подряд, проплывая за это время значительные расстояния - в тысячи километров. Ранее это было доступно только подводным глайдерам. "Автосабы" - это тип автономного подводного аппарата, который дает возможность проводить исследования подо льдами Арктики и Антарктики.
BioSwimmer (BILIS), Boston Engineering, США
Проект разработки подводного необитаемого аппарата, основанного на бионических принципах движения. Основан на проектах GhostSwimmer и RoboTuna.
Bluefin-9, Bluefin Technologies, США
Автономный необитаемый подводный аппарат Bluefin-9 компании Bluefin Technologies, США.
Bluefin-12S, Bluefin Technologies, США
Автономный необитаемый подводный аппарат Bluefin-12S компании Bluefin Technologies, США.
Bluefin-12D, Bluefin Technologies, США
Автономный необитаемый подводный аппарат Bluefin-12D компании Bluefin Technologies, США.
Bluefin-21, Bluefin Technologies, США
Автономный необитаемый подводный аппарат Bluefin-21 компании Bluefin Technologies, США.
Bluefin HAUV, Bluefin Technologies, США
Автономный необитаемый подводный аппарат Bluefin-12 компании Bluefin Technologies, США.
BR-II, Benthic Rover, США
2021.11.12 Benthic Rover II (BR-II) - один из ветеранов подводного роботостроения. В эксплуатации с 2011 года по 2020 года. Робот гусеничный, донный, самоходный. В общей сложности он прошел по дну несколько километров.
Это телеуправляемый аппарат, допускающий работу на глубинах до 6000 м. Кабель соединяет робот с антенной, расположенной на поплавке. Если радиосвязь с роботом будет утрачена, ему можно передать сигнал на аварийный сброс балласта по акустическому каналу. Полезная нагрузка робота позволяет снимать фото и видео, измерять температуру, концентрацию кислорода в воде, скорость течения. , фото.
Comanche 18, Sub-Atlantic, Объединенное Королевство
ТНПА легкого рабочего класса, позволяющий установить на него 2 манипулятора, что позволяет использовать его, например, для технического обслуживания буровых и аналогичных гидротехнических сооружений.
До 6000 метров.
Crabster CR200, KIOST, Южная Корея
Корейский институт технологий и океанологии (KIOST) с 2011 года работал над созданием Crabster, робота гексапода, предназначенного для океанографических исследоваий. Нестандартная конструкция движетеля робота предназначена для решения проблем винтовых ROV, поднимаемых со дна облаков ила. Задача робота - изучение подводных разломов.
Dorado, ISE (International Submarine Engineering)

Фото: ISE ; 2016. АНПА Dorado готовят к спуску на воду с исследовательского корабля Reseacher
АНПА (автономный неуправляемый подводный аппарат) шноркельного типа Dorado - не новинка. Концепция данного полупогруженного аппарата появилась еще в 80-е годы, тогда он назывался DOLPHIN (Deep Ocean Logging Platform with Hydrographic Instrumentation for Navigation). В период 1998-1988 конепция была реализована - компания ISE (International Submarine Engineering) построила такой аппарат.
2016.07.07 В Канаде тестируют военный противоминный подводный беспилотник типа Dorado. На этот раз он будет служить мирным целям мониторинга параметров морской среды.
ECA H300, ECA Hytec, Франция

ТНПА осмотрового типа. Предназначены для проведения осмотровых, исследовательских и легких подводно-технических работ на глубинах до 300 м. В России может быть доработан в ЗАО "НПП ПТ "ОКЕАНОС" под требования ТУ Заказчика. Подробнее:
, 2015.11.24
ECA H800, ECA Hytec, Франция
ТНПА осмотрового типа. Предназначены для проведения осмотровых, исследовательских и легких подводно-технических работ на глубинах до 800 м. В России может быть доработан в ЗАО "НПП ПТ "ОКЕАНОС" под требования ТУ Заказчика. Подробнее:
, 2015.11.24
Echo Ranger, Boeing, США
UAV, водоизмещение 5 тонн, глубина погружений - до 3000 м. Длина - 5.5 метра, диаметр - 1.27 м.
Echo Seeker, Boeing, США
UAV, длина 9.8 м.
Echo Voyager, Boeing, США

фото: Boeing
UAV, длина 15.5 м, не требует использования корабля поддержки. Способен автономно плавать под водой до нескольких месяцев за счет использования аккумуляторов, подзаряжаемых от бортового дизельгенератора. Может собирать различные данные, вести картографирование дна.
2016.03.21 .
ecoSUB μ, Ecosub Robotics Ltd., Объединенное королевство
Разработка Planet Ocean совместно с NOC и Университетом Саутгемптона. Миниатюрный АНПА - около 50 см длиной. Может использоваться, например, для контроля трубопроводов на наличие коррозии или выявления потенциальных утечек. Может использоваться в составе роя для создания 3D-карты подводной среды.
В ноябре 2016 года показан на выставке Marine Autonomy & Technology Showcase. Готовность к выходу на рынок ожидается весной 2017 года.
ecoSUB m, Ecosub Robotics Ltd., Объединенное королевство
Разработка Planet Ocean совместно с NOC и Университетом Саутгемптона. Миниатюрный АНПА - около 50 см длиной. Может использоваться, например, для контроля трубопроводов на наличие коррозии или выявления потенциальных утечек. Может использоваться в составе роя для создания 3D-карты подводной среды.
В ноябре 2016 года показан на выставке Marine Autonomy & Technology Showcase. Готовность к выходу на рынок ожидается весной 2017 года.
Eelume, Eelume и Kongsberg Maritime, Норвегия
Eelume S-series

2024.04.20 Eelume сотрудничает с Exail для оснащения АНПА инерциальной навигацией АНПА серии Eelume S
2017. Робот-змея, подводный осмотровый робот, построенный с использованием бионического подхода. Задача управляемого по кабелю робота - помогать проводить проверку размещенного под водой добывающего оборудования. На начало 2017 года в статусе "в разработке", есть действующий прототип. Ожидаемая готовность - к концу 2018 года.
Evie, Hydroswarm, США
Прототип подводного робота для исследований океана, в частности, поиска месторождений. Задумывается с перспективами использования роев таких роботов.
2016.01.31 .
2016.01.20 Стая подводных аппаратов Hydroswarm исследует Мировой океан
Fathom Drone, Fathom
Разработчик подводного телеуправляемого дрона Fathom. Статус - в стадии разработки. 2015.08.13 . Официальный сайт:
Gavia, Teledyne (создан в компании Harfmynd, Исландия), США
АНПА, созданный в Исландии компанией Hafmynd ehf. Создан до 2010 года. Использовался ВМФ РФ под названием "Гавиа". Закупался в РФ через ОАО "Тетис Про".
Gladius, Китай

ТНПА, любительского класса, глубина погружения - до 100 метров.
GhostSwimmer (Robo Tune 2), Boston Engineering, США
ТНПА бионического типа ("тунец"), развитие проекта RoboTuna. На его базе развиваются проекты BILIS/BioSwimmer.
фото прототипа робота-охотника,
Автономный подводный робот-убийца, предназначенный для охоты на рыб "крылаток". Робот оглушает крылатку электрошоком, затем втягивают ее в хранилище специальным "пылесосом", в дальнейшем рыбы могут быть проданы. Как ожидается, решение улучшит окупаемость роботизированной системы. В ходе испытаний в 2017 году робот обнаружил и убил порядка 15 рыб.
Haixung 6000 (Хайсин 6000, Starfish 6000, Морская звезда 6000), Шеньянский институт автоматизации, Китай
ТНПА Haixing 6000 (Хайсин - 6000). Источник фото:
Основная особенность Haixing 6000 состоит в том, что не только робот собран в Китае, но также и его система дистанционного управления. Робот снабжен мощным манипулятором, спос обным выполнять в погруженном состоянии различные работы.
Глубина погружения - показана до 6001 метра в октябре 2018
2018.11.01 Китайский подводный робот "Морская звезда" установил рекорд работы на глубине
Haiyi-7000, Шеньянский институт автоматизации, Китай

Китайский АНПА типа "глайдер". Предназначен для исследований океана и дна на глубинах до 7000 метров.
см. Bluefin HAUV.
Hercules
ТНПА (ROV). Работает в связке с Argus.
Вес: 2450 кг. Размеры 3.4 м х 1.8 м х 2.3 м
Мощность питания: 240 В, 3-фазное, менее 20 кВт
Глубина погружения - до 4000 м.
6 trusters
Hugin AUV, Kongsberg Maritime
Kongsberg Maritime, разработчик подводных автономных и телеуправляемых роботов, подробнее на сайте
2017.05.24 АНПА Hugin применяется для локации норвежских фьордов. .
iBubble, Франция

2016.04.22 Подводные селфи? Без проблем с iBubble! Подводная автономная камера, которая также может работать, как ROV с управлением по кабелю. На этапе разработки.
Iver 2, OceanServer, США

Разработан в 2005 году. Выпускался в различных модификациях: EP32, EP35, EP42, отличающихся мощностью аккумуляторной батареи и длиной корпуса. Закупался различными странами, включая Россию, Хорватию и т.п. в гражданских и военных целях. Базовая цена составляла $50 тысяч, с полной комплектацией (ГБО + система навигации по допплеровскому лагу) - порядка $150 тысяч. К 2009 году было продано более 100 комплексов на базе Iver 2.
Jason
ROV. Испытывается в 2016 году в пробном рейсе научного океанографического судна R/V Sally Ride.
Leng, DFKI (German Research Center for Artificial Inteligence), Германия
АНПА Leng разрабатывается для подводных исследований спутника Юпитера - Европы
2016.06
M-AUE, Scripps Institution of Oceanography, США

Подводные мини-буи, работающие в группе. Разработаны и используются в научных целях, например, проверки 3D-модели подводных океанических течений.
2017.01.25 Институт Океанографии Скриппса исследует океан с помощью роя подводных роботов.
MHC, Cybermetix, Франция
MHC от англ. Magnetic Hull Crawler Solution - краулер для осмотра и очистки корпуса судна.
Подробнее:
Munin AUV, Kongsberg Maritime
Kongsberg Maritime, разработчик подводных автономных и телеуправляемых роботов, подробнее на сайте
OceanOne, Oussama Khatib и специалисты Стэнфордского Университета, США
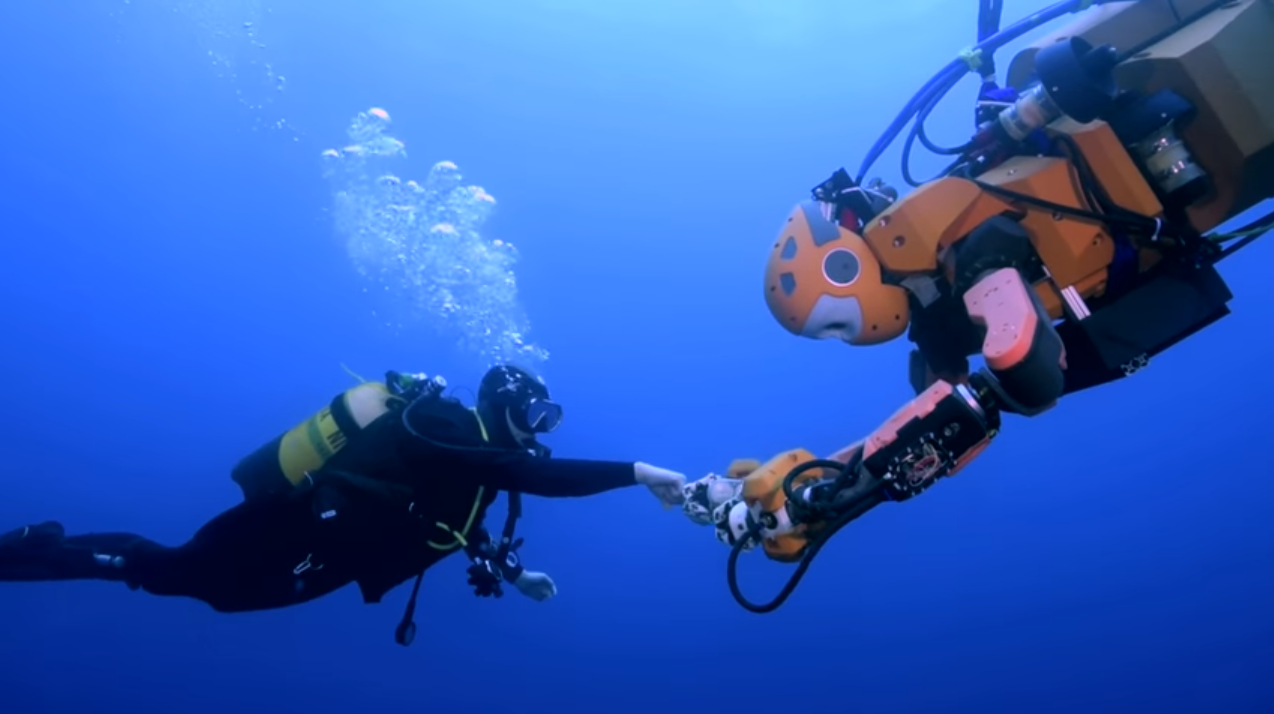
2016.04.29 Подводный телеуправляемый робот (ROV), способный взаимодействовать с различными объектами при помощи двух рук-манипуляторов. Робот-аквалангист по кабелю получает команды от оператора, находящегося на поверхности - аватар-система управляет манипуляторами робота, повторяя движения рук оператора. 2016.04.29 Аквалангист-аватар успешно прошел испытания.
OpenROV, OpenROV, США
ТНПА любительского класса, созданный на средства, собранные в ходе краудфандинговой кампании.
Panther Plus
См. Seaeye Panther Plus
Pioneer, BlueEye Robotics, Норвегия

Полупрофессиональный ТНПА, глубина погружения до 150 метров.
PowerRay, PowerView, Китай
Любительский ТНПА, глубина до 30 метров, управление по кабель-тросу, управление с пульта ДУ или смартфона. Робот оснащен съемным эхолотом, и цифровой HD-камерой, а также светодиодной подсветкой. Обещаны предзаказы с конца февраля 2017 года.
2017.01.05 Любительский подводный дрон для рыбалки показали на CES2017. #PowerRay
Qianlong-1, Shenyang Institute of Automation of Chinese Academy of Sciences, Китай
Глубоководный необитаемый аппарат. Расчетная глубина погружения до 6 тысяч метров. Для исследований океанского дна и сбора гидрологических данных. За период с 2013 года аппарат выдержал 121 погружение, включая 5 испытаний, после каждого из которых проводилась доработка решения. Пока что максимальная достигнутая глубина - 5213 метров. /
2015.09.06 .
Qianlong-2 (Tansuo), Shenyang Institute of Automation of Chinese Academy of Sciences, Китай
Глубоководный АНПА.
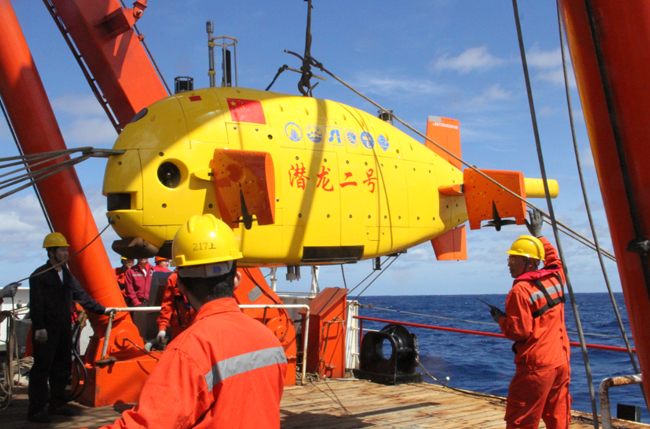
Источник фото:
2017.07.26 Подводного робота для больших глубин испытали в Южно-Китайском море. Первое тестовое погружение в Южно-Китайском море автономный глубоководный робот Tansuo (Таньсо) совершил 24 июля 2017 года. Погружение должно было занять 20 часов. Это робот из разряда продуктов "Сделано в Китае". Длина робота - 3.5 м, высота - 1.3 м, ширина - 0.7 м. Водоизмещение - 1.5 тонны. Он выполнен в форм-факторе, напоминающем гигантскую рыбу и по заверениям разработчиков может погружаться на глубины до 4.5 тысяч метров.
REMUS 100, Kongsberg Maritime
подводный автономный аппарат
REMUS 600-S, Kongsberg Maritime

Морской подводный автономный робот.
Подробнее на сайте /
REMUS 3000, Kongsberg Maritime
Kongsberg Maritime, разработчик подводных автономных и телеуправляемых роботов, подробнее на сайте
REMUS 6000, Kongsberg Maritime
Kongsberg Maritime, разработчик подводных автономных и телеуправляемых роботов, подробнее на сайте /
REMUS SharkCam, Kongsberg Maritime
Kongsberg Maritime, разработчик подводных автономных и телеуправляемых роботов, модификация REMUS 100 для поиска и подводных съемок морских животных /
RHMS, Lockheed Martin, США

Система RHMS включает в себя многоцелевой автономный подводный аппарат RMMV Lockheed Martin, оборудованный сонаром бокового обзора Raytheon. Аппарат способен погружаться на небольшие глубины и вести поиск мин. Возможно решение и других задач, необходимых ВМС США. Это по-задумке. Все же разработка, которая идет более 10 лет, похоже, оказалась не слишком удачной. В ходе испытаний, которые были продлены, система слишком часто выходила из строя. Вместе с тем, она находила мины даже быстрее, чем того требовало техзадание.
2016.08.05 Подводная система RHMS, разработанная для ВМС США, оказалась неэффективной и ненадежной
Robo-Shark, RoboSea, Китай

Двухметровая кастомизируемая бионическая подводная робоплатформа Robo-Shark, создана китайской компанией . Robo-Shark достигает в длину почти двух метров: 1800 х 870 х 960 мм. Вес подводного робота составляет порядка 54 кг, робот способен развивать скорость до 10 узлов и действовать в течение двух часов, погружаясь на глубину порядка 300 метров.
2019.03.15 Robo-Shark - китайская роботизированная акула.
RoboTuna, MTI, США
Необитаемый подводный аппарат бионического типа. Приводится в движение плавниками и изгибами корпуса, а не традиционным движетелем в виде гребного винта. Используется в исследовательских целях для отработки принципов движения. Существует в виде нескольких модификаций.
RU-27 (Scarlet Knight) типа Slocum, Teledyne Webb Research
Подводный глайдер. В 2009 году совершил 8-месячный трансатлантический переход до порта Байон, Испания. Пройденный путь - 7500 км. В 2008 году аналогичный аппарат был потерян в районе Азорских островов.
Scubo, Швейцарская высшая технологическая школа Цюриха, Швейцария
Подводный дрон на базе платформы Arduino с 6 камерами. Может двигаться в любую сторону. Способен работать в режиме автономности и в режиме телеприсутствия, в том числе с поддержкой очков дополненной реальности. Система построена по модульному принципу.
2016.06.16 В Швейцарии разрабатывают многофункциональный подводный дрон #Scubo
SeaBotix LBV600-6, Teledine SeaBotix, США
ROV. Описание на сайте производителя.
Seaeye Cougar XT, SAAB Seaeye
ROV
Seaeye Falcon, Saab Seaeye, Швеция

Телеуправляемый подводный аппарат класса ROV семейства "Морской глаз". Разработка 2002 года, погружение до 300 метров, 14 кг полезной нагрузки.
Seaeye Leopard, Saab Seaeye, Швеция

Телеуправляемый подводный аппарат класса ROV семейства "Морской глаз" - "Пантера" и "Пантера +". Оснащен двумя манипуляторами. Разработка SAAB, Швеция. Официальная страница . Используется в том числе ВМФ России.
2015.05.26 .
Seaeye Lynx, SAAB Seaeye, Швеция
ROV
Seaeye Panther Plus, SAAB Seaeye, Швеция
Группа телеуправляемых подводных аппаратов. Глубина погружения - до 1 км. Два гидравлических манипулятора на которые можно установить дополнительное оборудование, также у него есть функции автоматического удержания глубины, гидролокатор кругового обзора, система гидроакустического позиционирования и устройство для размыва грунта.
Закупались компанией Tetis Pro для российского ВМФ.
официальный сайт: .
2015.09.07 . #ROV
2006.12.11
Seaeye Panther Plus 906 ROV, SAAB Seaeye, Швеция
Закупался Россией в 90-е и 00-е годы.
Seaeye Panter Plus 921 ROV, SAAB Seaeye, Швеция
Телеуправляемый подводный аппарат. Два гидравлических манипулятора на которые можно установить дополнительное оборудование, также у него есть функции автоматического удержания глубины, гидролокатор кругового обзора, система гидроакустического позиционирования и устройство для размыва грунта.
2015.09.07 . #ROV
Seaeye Panther Plus 925 ROV, SAAB Seaeye, Швеция
Seaeye Sabertooth AUV, SAAB Seaeye, Швеция
гибридный НПА интервенционного класса
Seaeye Tiger, SAAB Seaeye, Швеция

ROV. Глубина погружения - до 300 метров.
Закупался Россией в 90-е и 00-е годы.
Seaglider, Kongsberg Maritime, Норвегия
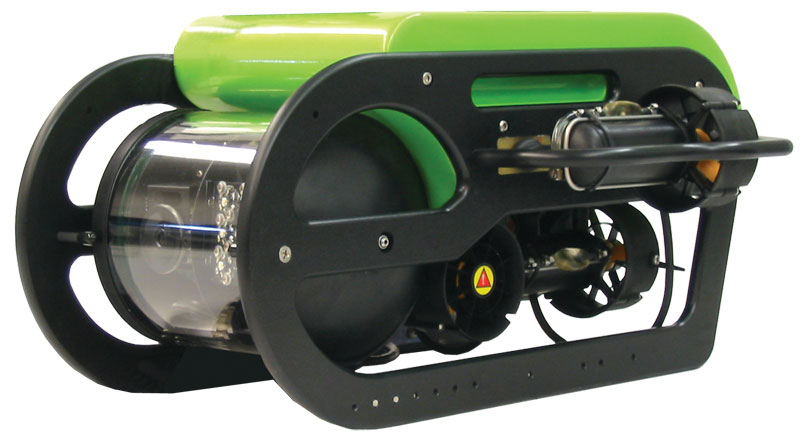
Seamor 300T, Ocean System, Inc., США

до 300 м глубины, ТНПА. Подробнее по ссылке
Singray, Stingray Marine Solutions, Норвегия
Стационарное погруженное под воду устройство, предназначенное для автономного дистанционного уничтожения паразитов на чешуе рыб в садках хозяйств, занимающихся разведением рыбы. Речь идет о десятках тысяч паразитов в день.
2017.04.13 Подводный робот уничтожит рыбью вошь. Лазером.
Slocum G2, Teledyne Webb Research, США
Популярная платформа автономного подводного глайдера
Есть модификации: глайдер Slocum с электроприводом и глайдер Slocum с питанием от термоклина
SMD-Hydrovision
Необитаемый подводный аппарат. В 90-е годы закупался Россией для "поисково-спасательных" операций.
Submurres, InnoCorp
2017.02 Анонсировано беспилотное устройство SubMurres, способное плыть под водой, по-поверхности, взлетать с воды, садиться на воду и на сушу. Устройство оснащено дизельным двигателем, электрогенератором, электродвигателями, аккумуляторной батареей.
Tortuga, SeaClear, Евросоюз
![]()
https://www.subsea-tech.com/tortuga/
ТНПА может работать на глубинах до 500 м и предназачен для проведения инспекций. Каждый из четырех горизонтальных движителей может обеспечить тягу до 17 кгc. Устройство может работать при течении со скоростью до 4 узлов, назависимо от направления течения. Устройство отличает отношение 1.5 "тяга к весу" и полностью интегрированное решение для акустического получения изображений. : .pdf
2020.09 Устройство планируется применить в составе комплекса для очистки акваторий от мусора.
Trident, OpenROV, США
Trident - на фото справа (слева - OpenROV).
Краудфандинговый проект. 3 двигателя. Кабель-трос до 25 метров длиной. Опциональный кабель длиной до 100 метров. Кабель можно подключать к бую с Wi-Fi приемопередатчиком. Бортовая цифровая HD-камера. Поддержка FPV-режима с очками виртуальной реальности Oculus Rift. Светодиодные светильники. 3 часа работы от встроенных аккумуляторов. Первым покупателям в конце 2016 года аппарат обещан за $600.
U-CAT, Center for Biorobotics at Tallin Univercity, Эстония
источник:
Подводный робот, предназначенный для работ на морских фермах. Может использоваться также для морской археологии, геологии. Создан в 2013 году. Особенности: сконструированный в форм-факторе морской черепахи аппарат, вместо "классических" водометов или винтов использует четыре плавника. Каждый плавни имеет независимый привод и управление. Плавники не только обеспечивают роботу подвижность, но также позволяют роботу не поднимать взвесь, ил. Еще важнее то, что медлительный U-Cat не пугает рыб на рыбофермах в отличие от водолазов и аквалангистов, а также подводных роботов "классического" типа.
UX-1Neo, UNEXMIN GeoRobotics

2022.12 Похожий на сферу аппарат диаметром около 0.7 м представляет собой развитие системы UX-1, способной выполнять миссии автономно или в режиме телеуправления. Модульный робот несет на борту сонар, оптические и гиперспектральные камеры и системы освещения – за два дня исследователи сформировали трехмерную карту пропасти до глубины 450 метров. Робот весит порядка 90 кг, погружается на глубину до 500 метров, а время его автономной работы составляет до 8 часов. .
Venom
Подводный необитаемый аппарат. В 90-е и 00-е годы закупался Россией.
2019.10.14 Отмечается использование "подводного роботизированного аппарата" "Веном" на Камчатке, в ходе учений по отработке сценария спасения экипажа подводной лодки, лежащей на глубине 30 миетров. С Венома осещствлялся контроль за безопасностью процесса. /
Yogi, GFOE
ТНПА создан в Global Foundation for Ocean Exploration.
+ +
Смотрите связанные статьи Robo-педии:
Смотрите связанные статьи Robo-педии:
- Aquanaut
- Autosub 6000 LR
- BioSwimmer
- Bluefin Robotics HAUV
- Comanche 18
- Concept
- Crabster CR200
- Echo Voyager
- Eelume
- Fathom One
- Gavia
- GhostSwimmer
- Gladius
- Haiyi-7000
- Iver 2
- MUR (Micro Underwater Robot)
- OceanOne
- Pioneer
- REMUS 100
- ROV RB-600
- RoboTuna
- Seaeye Falcon
- Seaeye Tiger
- Seaglider
- Seamor 300T
- Slocum G2
- TurtleROV
- TurtleROV2
- U-Cat
- X15 (Hydrobot-X)
- X450 (Hydrobot-X)
- XLUUV - подводные роботы с большим и очень большим водоизмещением
- ecoSUB m
- ecoSUB μ
- Айсберг
- Акмобиль
- Амулет
- ГНОМ
- Галтель
- Галтель
- Глубоководные
- Каталог любительских подводных роботов
- Концепт-М (российская версия Gavia)
- МСС-1000
- МСС-3000
- МСС-350
- МСС-350М
- МагМастер
- Малахит, ТНПА "Малахит"
- Марлин-350
- Моби Дик
- Платформа
- Подводные роботы для работы на дне
- Российская подводная робототехника в XX-веке
- Сарма
- Селигер
- Фалкон-1000
Публикации по теме:
 30.05.2026 ROV Blueye X7 - современный форм-фактор и элегантная раскраска
30.05.2026 ROV Blueye X7 - современный форм-фактор и элегантная раскраска 12.01.2026 Компания «Русская морская команда» сообщила о проведенных в бассейне испытаниях ТНПА легкого класса
12.01.2026 Компания «Русская морская команда» сообщила о проведенных в бассейне испытаниях ТНПА легкого класса 20.11.2025 H-ROV Wraith – новинка в линейке Mission Specialist американской VideoRay
20.11.2025 H-ROV Wraith – новинка в линейке Mission Specialist американской VideoRay 02.10.2025 Новозеландская Boxfish Robotics показывает AUV Boxfish и ROV ARV-i на выставке OCEANS 2025 Great Lakes в Чикаго
02.10.2025 Новозеландская Boxfish Robotics показывает AUV Boxfish и ROV ARV-i на выставке OCEANS 2025 Great Lakes в Чикаго 03.09.2025 В Южно-Китайском море испытали ROV Хайцинь (Haiqin)
03.09.2025 В Южно-Китайском море испытали ROV Хайцинь (Haiqin) 24.07.2025 На выставке IDEF 2025 в Стамбуле компания Aselsan представила AUV DERİNGÖZ
24.07.2025 На выставке IDEF 2025 в Стамбуле компания Aselsan представила AUV DERİNGÖZ 21.07.2025 Подводный робот Прометей Астраханского ГУ в рамках испытаний в Анапе собрал около 2 тонн мазута
21.07.2025 Подводный робот Прометей Астраханского ГУ в рамках испытаний в Анапе собрал около 2 тонн мазута 16.01.2025 SMD и Beam идут к автономной проверке ветроэнергетики с использованием ИИ
16.01.2025 SMD и Beam идут к автономной проверке ветроэнергетики с использованием ИИ 20.04.2024 Eelume сотрудничает с Exail для оснащения АНПА инерциальной навигацией
20.04.2024 Eelume сотрудничает с Exail для оснащения АНПА инерциальной навигацией 07.04.2024 Водородные топливные элементы и бортовой ИИ - перспективные направления развития АНПА?
07.04.2024 Водородные топливные элементы и бортовой ИИ - перспективные направления развития АНПА? 14.03.2024 HII Mission Technologies представила новый АНПА REMUS 130
14.03.2024 HII Mission Technologies представила новый АНПА REMUS 130 16.02.2024 Nauticus Robotics привлек $12 млн на коммерциализацию Aquanaut
16.02.2024 Nauticus Robotics привлек $12 млн на коммерциализацию Aquanaut 03.02.2024 Шведская экспедиция потеряла АНПА в Антарктиде
03.02.2024 Шведская экспедиция потеряла АНПА в Антарктиде 25.12.2023 Teledyne Marine открывает центр обслуживания АНПА в Польше
25.12.2023 Teledyne Marine открывает центр обслуживания АНПА в Польше 12.11.2023 Reach Robotics запускает усовершенствованную систему вмешательства
12.11.2023 Reach Robotics запускает усовершенствованную систему вмешательства 11.11.2023 FET поставит ТНПА рабочего класса Министерству обороны Великобритании
11.11.2023 FET поставит ТНПА рабочего класса Министерству обороны Великобритании 27.09.2023 Saab получил американскую лицензию на поставки своих АНПА дальнего действия
27.09.2023 Saab получил американскую лицензию на поставки своих АНПА дальнего действия 22.09.2023 Министерство обороны Великобритании закупает контейнерные телеуправляемые буксируемые аппараты
22.09.2023 Министерство обороны Великобритании закупает контейнерные телеуправляемые буксируемые аппараты 11.09.2023 В Канаде начали испытывать подводный аппарат класса XLUUV компании Cellula Robotics
11.09.2023 В Канаде начали испытывать подводный аппарат класса XLUUV компании Cellula Robotics 29.06.2023 Морской робототехнический комплекс (МРТК). Пульт управления МРТК и НПА
29.06.2023 Морской робототехнический комплекс (МРТК). Пульт управления МРТК и НПА 28.06.2023 СПбГМТУ представил волновой глайдер и макет подводного глайдера на МВМС-2023
28.06.2023 СПбГМТУ представил волновой глайдер и макет подводного глайдера на МВМС-2023 12.05.2023 Морской робот проинспектировал ветряную ферму
12.05.2023 Морской робот проинспектировал ветряную ферму 08.12.2022 Подводный робот картографировал часть Границкой бездны
08.12.2022 Подводный робот картографировал часть Границкой бездны 05.08.2022 OceanOneK - подводный робот-аквалангист с обратной связью освоил глубины до 1000 м!
05.08.2022 OceanOneK - подводный робот-аквалангист с обратной связью освоил глубины до 1000 м! 17.08.2021 Иван Медведков, Смартдайв, "Мы принципиально дистанцировались автономностью работы"
17.08.2021 Иван Медведков, Смартдайв, "Мы принципиально дистанцировались автономностью работы" 15.05.2021 Hydromea представила прототип ТНПА с беспроводным каналом связи
15.05.2021 Hydromea представила прототип ТНПА с беспроводным каналом связи 06.03.2021 Китайскому мягкому роботу покорились глубины Марианской впадины
06.03.2021 Китайскому мягкому роботу покорились глубины Марианской впадины 10.12.2020 Рыбоводство получило новый инструмент - робота для контроля качества клеток
10.12.2020 Рыбоводство получило новый инструмент - робота для контроля качества клеток 22.12.2019 Terradepth привлекли $8 млн на производство подводных роботов
22.12.2019 Terradepth привлекли $8 млн на производство подводных роботов 26.09.2019 Робототехника: Marine Geo Service покажет газовикам подводные аппараты
26.09.2019 Робототехника: Marine Geo Service покажет газовикам подводные аппараты 07.09.2019 Робототехника: Студенты ДВФУ представили интервенционный ТНПА "Сокол тысячелетия"
07.09.2019 Робототехника: Студенты ДВФУ представили интервенционный ТНПА "Сокол тысячелетия" 07.09.2019 Робототехника: В России создадут автономный подводный робот с манипулятором
07.09.2019 Робототехника: В России создадут автономный подводный робот с манипулятором 17.04.2019 Skolkovo Robotics 2019: Marine Geo Service и МСС-1000
17.04.2019 Skolkovo Robotics 2019: Marine Geo Service и МСС-1000 15.03.2019 Robo-Shark - китайская роботизированная акула
15.03.2019 Robo-Shark - китайская роботизированная акула 22.12.2018 В Геленджике испытывают ТНПА МСС-3000
22.12.2018 В Геленджике испытывают ТНПА МСС-3000 15.08.2018 Австралийский подводный робот готов к исследованию таяния ледников в Антарктиде
15.08.2018 Австралийский подводный робот готов к исследованию таяния ледников в Антарктиде 27.07.2018 АНПА - платформы для сбора данных следующего поколения
27.07.2018 АНПА - платформы для сбора данных следующего поколения- 30.06.2018 Студент Астраханского ГТУ разработал легкий ТНПА
 30.06.2018 Американские подводные роботы научились действовать группой
30.06.2018 Американские подводные роботы научились действовать группой 11.06.2018 В Массачусетском Технологическом Институте разработали робота-рыбу SoFi
11.06.2018 В Массачусетском Технологическом Институте разработали робота-рыбу SoFi 26.07.2017 Подводного робота для больших глубин испытали в Южно-Китайском море
26.07.2017 Подводного робота для больших глубин испытали в Южно-Китайском море- 29.06.2017 МГТУ им. Баумана показал на МВМС-2017 безымянный прототип ТНПА
 23.06.2017 В Самаре тестируют подводный планер. Пока что в бассейне
23.06.2017 В Самаре тестируют подводный планер. Пока что в бассейне 18.06.2017 Самая большая автономная подлодка США Echo Voyager вышла в море
18.06.2017 Самая большая автономная подлодка США Echo Voyager вышла в море 16.06.2017 Робот Toshiba "Мини-мамбо" обследует третий реакторный блок Фукусимы
16.06.2017 Робот Toshiba "Мини-мамбо" обследует третий реакторный блок Фукусимы 22.05.2017 Робот-рыба проконтролирует кислотность воды
22.05.2017 Робот-рыба проконтролирует кислотность воды- 18.05.2017 Подводный робот, разработанный студентами СПбГМТУ стал победителем всероссийского конкурса
 10.05.2017 Энергия Мирового океана вместо углеводородов
10.05.2017 Энергия Мирового океана вместо углеводородов- 30.04.2017 Вектор: В ФПИ мечтают о подводных комплексах с ядерными реакторами
 23.04.2017 "Моби Дик - 1000" достиг рекорда глубины на Байкале
23.04.2017 "Моби Дик - 1000" достиг рекорда глубины на Байкале










Yogi Submersible Robot Set To Explore Depths Of Yellowstone Lake (video) Собирают средства на этого робота на Kickstarter.
Любопытная цитата: "Наряду с водолазами неустанно работает специальный робот «Sia Seamor 300 T» канадского производства [Прим. АБ: речь об американском роботе Seamor 300T], который доставили из Ханты-Мансийска. Такое оборудование гораздо мощнее робота «Гном», с которым до сих пор работали наши спасатели, и способно «видеть» под водой на расстоянии 1,5 м (против 30-50 см у «Гнома»). Аппарат «Sia Seamor» больше «Гнома», его размеры примерно 50х40х40 и он похож на батискаф, только необитаемый." / ugra-news.ru